Technical Analysis of Inclinometer Tilt: Accurate Measurement, Stable and Reliable
Jun 13, 2025
Discover the advanced technology behind electronic tilt sensors (inclinometers), their working principles, advantages, applications, and future trends. Ideal for industrial automation, construction, aerospace, and more.
Introduction: The Importance of Inclination Measurement
In modern industrial automation, construction engineering, aerospace, and geological exploration, the inclination measurement technology plays a crucial role. Whether it is the posture adjustment of large mechanical equipment, the deformation monitoring of building structures, or the flight stability control of unmanned aircraft, precise inclination data is the foundation for ensuring the safe operation and efficient operation of the systems.
The electronic inclinometer Tilt is a core device in the field of angle measurement. With its high precision, high stability and digital output features, it is gradually replacing traditional mechanical angle measurement tools and has become the new favorite in the industrial measurement field.
The working principle of the electronic inclination meter
The core principle of the electronic inclinometer is based on MEMS (Micro-Electro-Mechanical Systems) acceleration sensors or liquid capacitance sensing technology. When the device is tilted, the sensor will sense the changes in the components of gravitational acceleration along each axis, and through specific algorithms, calculate the tilt angle of the device relative to the horizontal plane.
Take the three-axis MEMS inclinometer as an example. Its working principle can be briefly described as follows:
1. Three orthogonal accelerometers are used to measure the gravitational components along the X, Y, and Z axes respectively.
2. The inclination angles in each direction are calculated using trigonometric functions.
3. Environmental interference is eliminated through temperature compensation and filtering algorithms.
4. High-precision digital inclinometer signals are output.
The technical advantages of the electronic inclinometer
Compared with traditional mechanical inclinometers, electronic inclinometers have the following significant advantages:
1. High-precision measurement: Modern electronic inclinometers can achieve a resolution of 0.01°, meeting the precision requirements of most industrial applications.
2. Digital Output: Outputs digital signals directly, facilitating integration with PLCs, industrial control computers, and other automated equipment, and simplifying the system architecture.
3. Multi-axis measurement capability: It can simultaneously measure the pitch angle, roll angle, and even yaw angle, providing comprehensive attitude information.
4. Strong anti-interference capability: Equipped with filtering algorithms and temperature compensation mechanisms, it can effectively resist environmental disturbances such as vibration and temperature variations.
5. Compact size: Utilizing MEMS technology, the sensor's size is significantly reduced, making it particularly suitable for applications with limited space.
Typical application scenarios
The electronic inclination meter, thanks to its outstanding performance, has been widely applied in various fields:
1. Construction Engineering Field
- Health Monitoring of Large-scale Building Structures
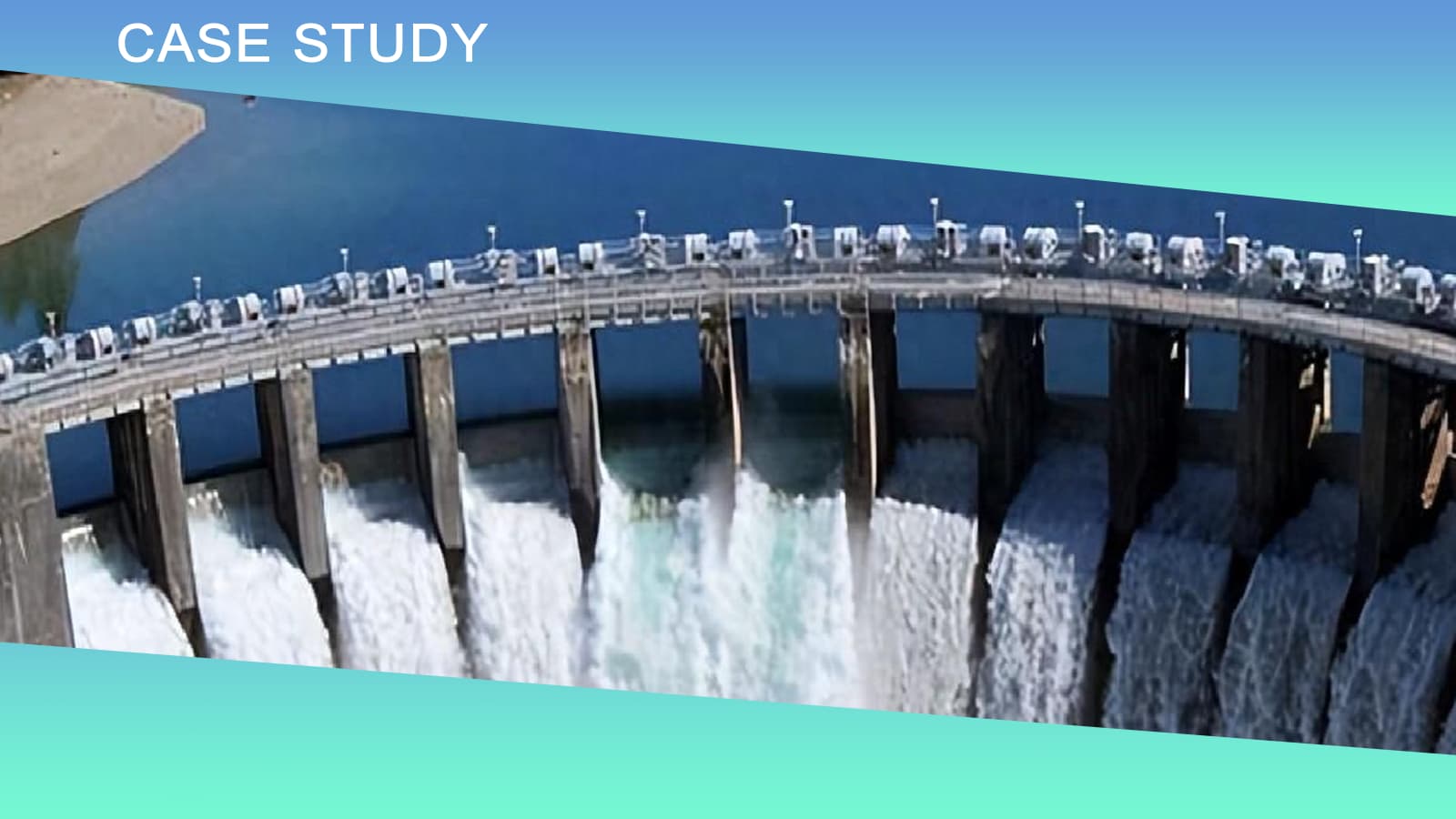
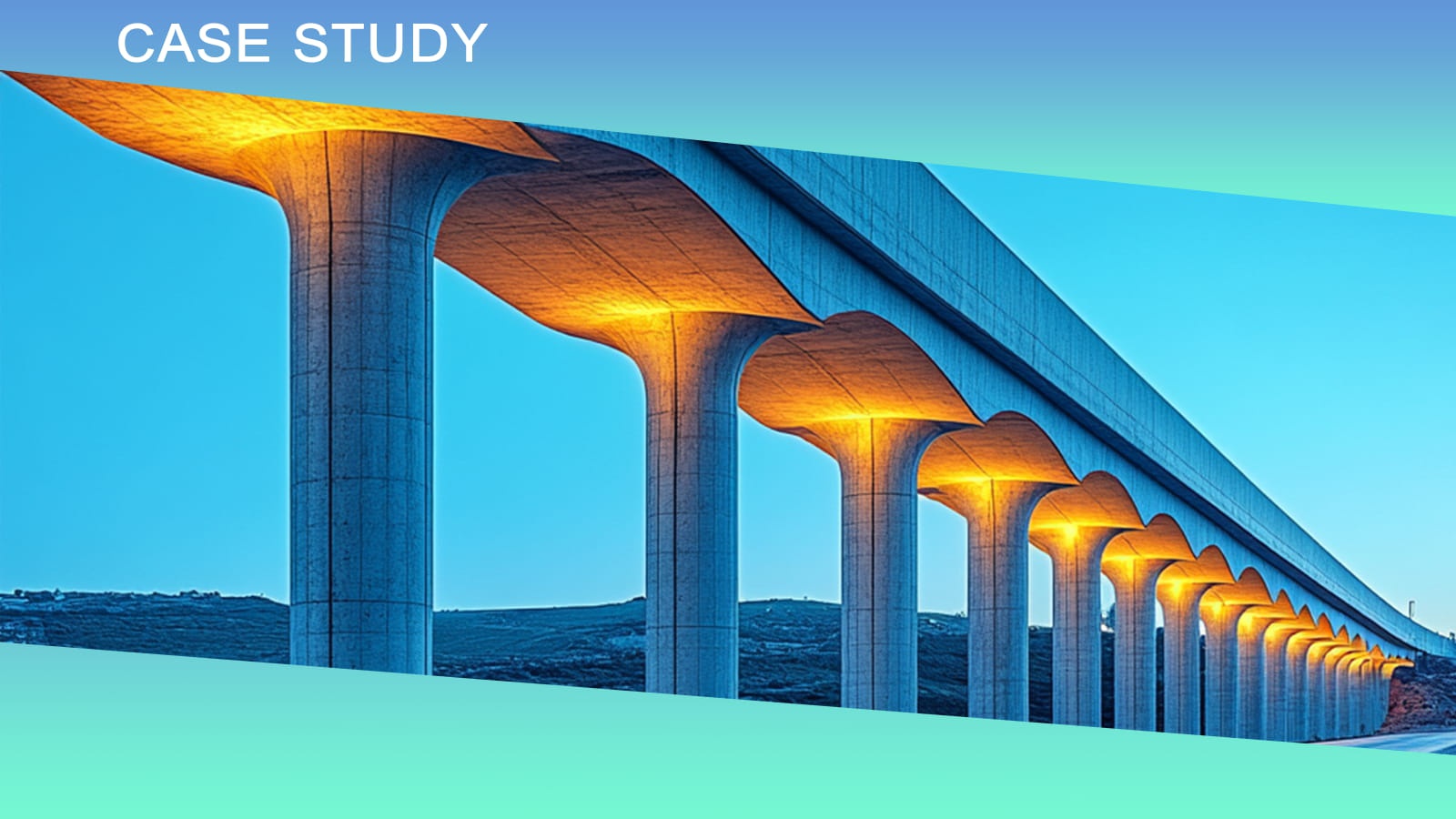
- Deformation Monitoring of Infrastructure Such as Bridges and Dams
- Attitude Control of Construction Equipment Such as Tower Cranes and Elevators
2. Industrial Automation
- Level control of engineering machinery
- Equipment calibration of automated production lines
- Positioning control of warehousing and logistics equipment
3. Aerospace
- Stable flight posture of unmanned aircraft
- Directional alignment of satellite solar panels
- Landing assistance system for aircraft
4. Geological Exploration
- Monitoring of the inclination angle of drilling equipment
- Warning system for landslides
- Guidance for underground pipeline laying
Technical Challenges and Solutions
Although the electronic inclinometer technology is quite mature, it still encounters some challenges in practical applications:
1. Temperature drift issue
Temperature variations can cause the sensor's zero point to drift, thereby affecting measurement accuracy. Modern electronic inclinometers employ temperature compensation algorithms and real-time temperature sensor corrections to minimize the impact of temperature.
2. Vibration Interference
Mechanical vibrations in the working environment can generate additional acceleration interference signals. The solutions include:
- Implementing mechanical damping design on the hardware
- Implementing digital filtering algorithms on the software
- Selecting liquid capacitive sensors with better anti-vibration performance
3. Installation Error
The unevenness of the sensor installation surface can introduce systematic errors. The advanced electronic inclinometer provides an installation calibration function, which can eliminate installation errors through a simple calibration process.
Future Development Trends
With the widespread adoption of Industry 4.0 and Internet of Things technologies, the electronic inclinometer technology is evolving in the following directions:
1. Higher integration: Integrating inclinometer measurement, data processing and wireless communication functions onto a single chip enables a more compact design.
2. Intelligence: Equipped with AI algorithms, it can perform self-diagnosis, self-calibration and adapt to the environment.
3. Wirelessization: Utilizing low-power Bluetooth, LoRa and other wireless technologies, it is easy to deploy in scenarios where wiring is difficult.
4. Multi-sensor fusion: By integrating sensors such as gyroscopes and magnetometers, it provides more comprehensive attitude information.
Conclusion
The electronic inclinometer, as a key component in modern industrial measurement, is experiencing rapid technological advancements. Whether it is in on-site construction work, the attitude control of precision equipment, or the safety monitoring of infrastructure, the electronic inclinometer is playing a crucial role in the background.
When choosing an appropriate electronic inclinometer product, it is recommended to consider factors such as measurement range, accuracy grade, environmental adaptability, and output interface. For special application scenarios, customized solutions can also be considered to achieve the best measurement results. Micro-Magic Company provides tools and technical support for aerospace, mining drilling, and other engineering projects. The current electronic compass series includes products such as T700-I and T7000-B, which have soft magnetic and hard magnetic compensation functions, playing an important role in improving the compass pointing accuracy.
T700-I
Whatever you needs, Micro-Magic is at your side.
T7000-B
Whatever you needs, Micro-Magic is at your side.
T7000-J
Whatever you needs, Micro-Magic is at your side.


 Network Supported
Network Supported


 English
English






