High Precision Fiber Optic Inertial Navigation System Dual Antenna Gnss+Ins Rtk for Uav, Ships and Vehicles


This product has built-in three-axis integrated high-precision fiber optic gyroscope, three-axis high-precision quartz flexible accelerometer and mobile surveying-level multi-mode multi-frequency GNSS receiver supporting autonomous Beidou function. Through advanced intelligent combined navigation algorithm and Kalman filter, it is optimized for GNSS occlusion and multipath interference, and can achieve high-precision heading, attitude, speed and position measurement of moving carriers.
This inertial navigation system also has multiple sensor interfaces such as GNSS/odometer/DVL/barometric altimeter, which can well meet the long-term, high-precision and high-reliability navigation application requirements in complex environments such as urban canyons, and can be used for navigation and control of various unmanned systems.
Product features include: fast and accurate determination of initial heading and attitude, support for real-time heading and attitude output, built-in GPS and Beidou dual-mode receiver, support for dynamic fast alignment, INS/GNSS combination integrated design, support for IE post-processing, enhanced Kalman filter algorithm, and resistance to electromagnetic interference and vibration. It can be used in vehicle-mounted, airborne, ship navigation, stability control and other fields.
Part No, :
IF3600Order(MOQ) :
1Product Series and Parameters
| INS/GNSS Integrated Navigation Accuracy | ||||
| Attitude Accuracy | Heading: ≤0.02° (1σ) | |||
| Pitch/Roll: ≤0.005° (1σ) | ||||
| Position Accuracy | Single Point Positioning: ≤2m (50% CEP) | |||
| RTK: ≤2cm + 1ppm (50% CEP) | ||||
| Velocity Accuracy | ≤0.02m/s (1σ) | |||
| Alignment Time | Starts after obtaining latitude, longitude, and altitude. Alignment duration: ≤5min. | |||
| INS/Odometer/DVL Integrated Accuracy | 0.25% ×mileage (dependent on Odometer or DVL accuracy) | |||
| Pure Inertial Navigation Accuracy | ||||
| Attitude Accuracy | Azimuth Alignment: ≤0.1°sec(Φ) (1σ, Φ: local latitude) | |||
| Horizontal Alignment: ≤0.008° (1σ) | ||||
| Azimuth Maintenance: 0.03°/h (1σ) | ||||
| Horizontal Maintenance: 0.02°/h (1σ) | ||||
| Position Accuracy | ≤1 nautical mile/h (50% CEP) | |||
| Key Component Characteristics | ||||
| Gyroscope | Range | ±500°/s | Bias Stability | 0.03°/h (1σ) |
| Accelerometer | Range | ±20g | Bias Stability | ≤20μg (1σ) |
| Physical Characteristics | Interface Characteristics | |||
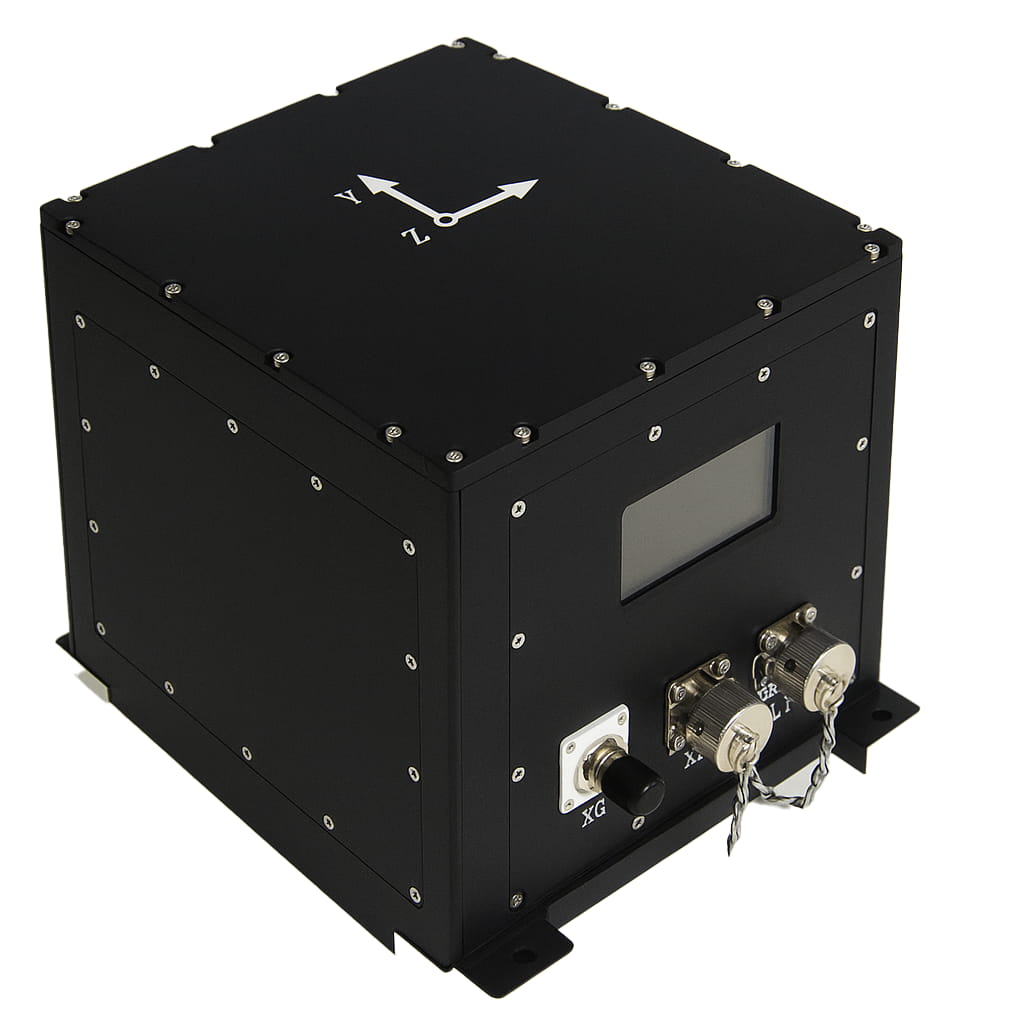
| Power Supply Voltage | 24V DC nominal (12–32V DC) | Interface Type | 4× serial ports (RS232/RS422) | |
| Power Consumption | <20W | Supported Signals: PPS, EVENTMARK input/output | ||
| Operating Temperature | -40℃ to +60℃ | Transmission Rate | 9600–921600 bps (configurable) | |
| Protection Rating | IP65 | User Modes | ||
| Dimensions | ≤136mm ×136mm × 150mm | |||
| Weight | ≤3.8kg | Vehicle-mounted (default), Airborne, Shipborne | ||
Production process
Product dimension

Application Scenarios



FAQ











Xml Privacy Policy Blog Sitemap
copyright @ Micro-Magic Inc All Rights Reserved.
 Network Supported
Network Supported



 English
English