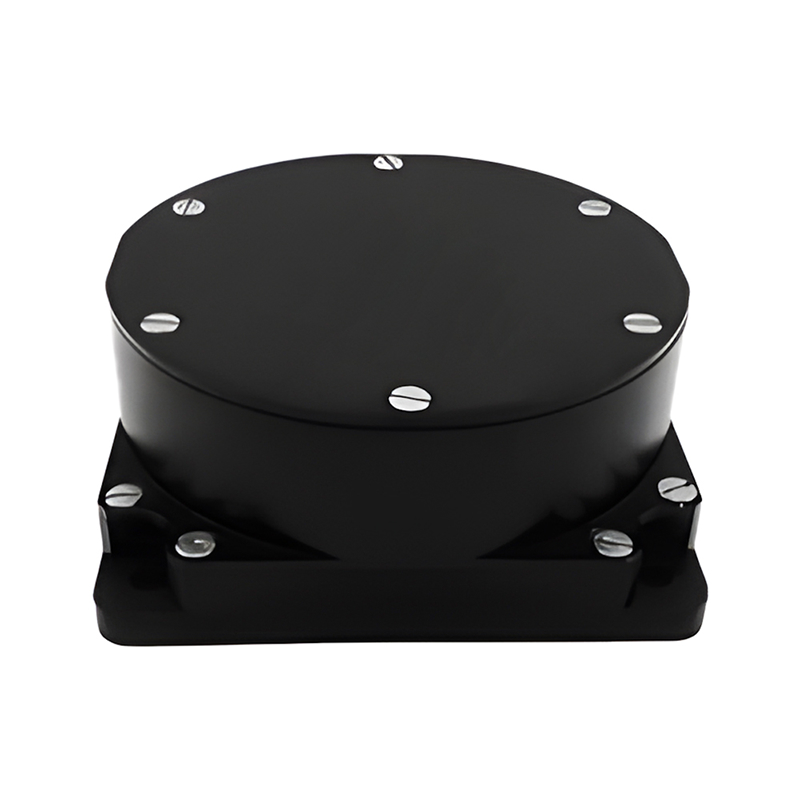
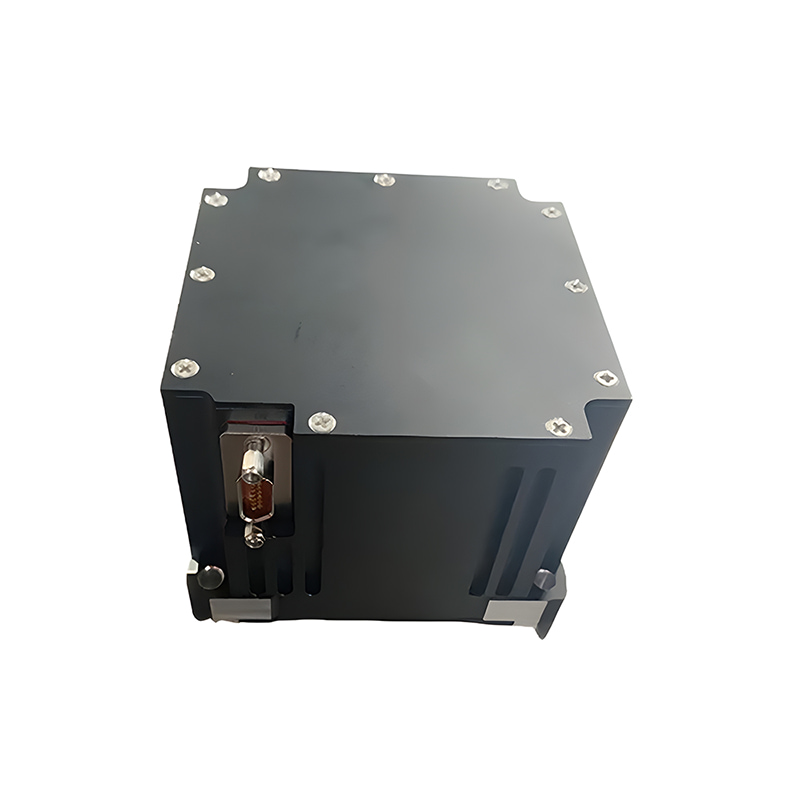
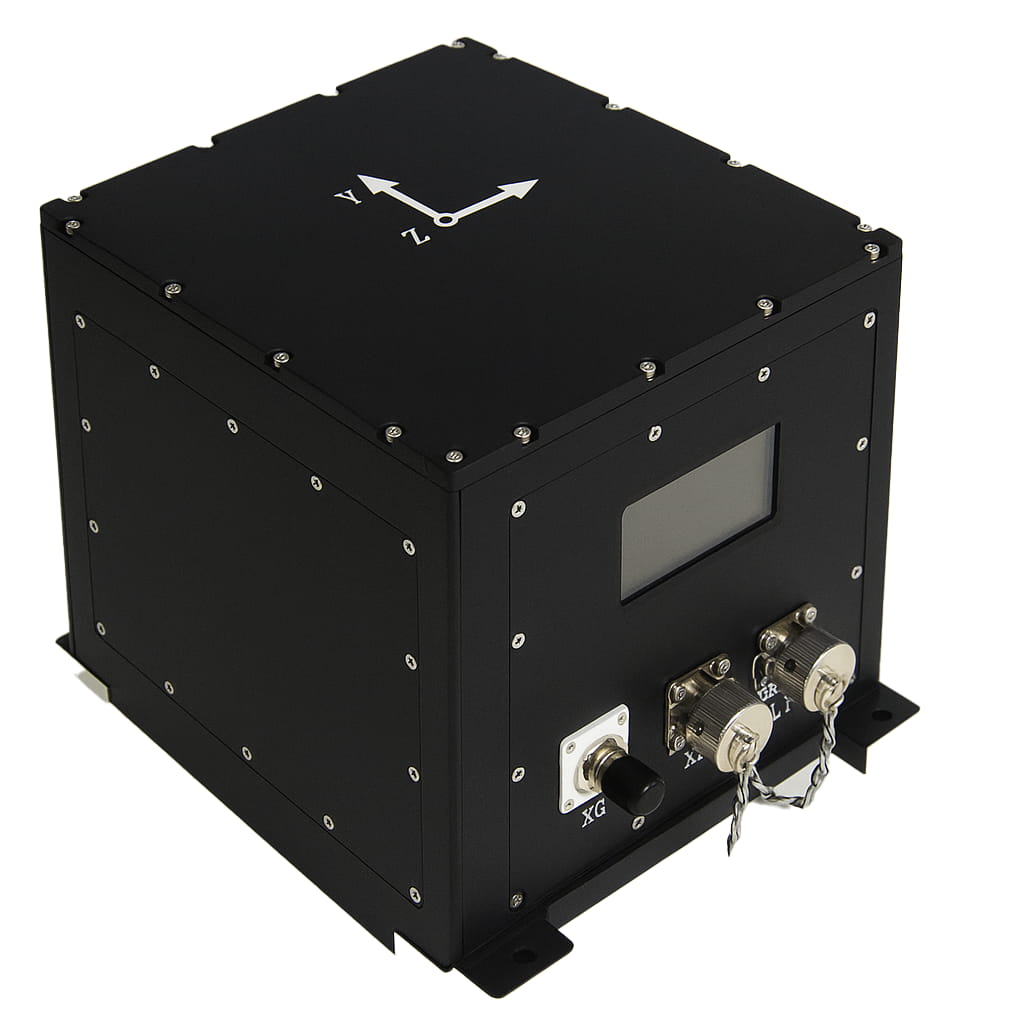
High-Performance Fiber Optic Gyroscope-Based Inertial Navigation System for Drone, Ship, and Airborne Applications Accurate, Reliable, and Robust

This is the article for IF4010 related specific technical requirements for the FOG-40 type inertial measurement unit, which type of inertial measurement unit can be widely used in vehicle mounted, shipborne, airborne and other fields.
Part No, :
IF4010Order(MOQ) :
1Product Series and Parameters
| Accuracy requirements for angular velocity measurement | |
| Angular velocity measurement range | ± 300 °/s |
| Room temperature zero bias stability (1sigma 10s smooth) | ≤ 0.8 °/h |
| High and low temperature constant temperature zero bias stability (1sigma 10s smooth) | ≤ 1.0 °/h |
| Room temperature zero bias repeatability (1sigma): | ≤ 0.5 °/h |
| Full temperature zero bias repeatability (1sigma): ≤ 0.8 °/h; | ≤ 0.8 °/h; |
| Nonlinear scaling factor at room temperature | ≤ 500ppm; |
| Room temperature scale factor repeatability | ≤ 300ppm; |
| Gyroscope bandwidth | ≥300Hz (design guarantee) |
| Gyroscope precision start time | 10 seconds. |
| Accuracy requirements for linear velocity measurement | |
| Acceleration measurement range | ± 20g (guaranteed selection) (optional 50g product, slightly lower accuracy); |
| Room temperature zero bias stability (1sigma 10s smooth) | ≤ 200ug; |
| Room temperature zero bias repeatability (1sigma) | ≤ 200ug; |
| Start time | 10 seconds. |
| Initial alignment accuracy requirements | |
| Initial alignment method | It can perform initial alignment of the shaking base, initial alignment of the mooring system, and initial alignment between external information assisted travel |
| Initial self alignment heading accuracy of the shaking base | ≤1.5 ° * secL (L is the local latitude) |
| Initial self alignment pitch accuracy of shaking base | ≤0.05 ° |
| Initial self alignment roll accuracy of the shaking base | ≤0.05 ° |
| Initial self alignment time for shaking the base | 5 minutes (adaptive modifications can be made, and the recommended initial alignment time for the mooring system is 10 minutes) |
| Requirements for pure inertial navigation indicators for satellite failure | |
| Inertial navigation heading angle maintenance (drift) accuracy | ≤1.5 °/h (peak) |
| Inertial guidance pitch angle maintenance (drift) accuracy | ≤1.0 °/h (peak) |
| Inertial roll angle maintenance (drift) accuracy | ≤1.0 °/h (peak) |
| Heading angle measurement range | 0 °~360 ° |
| Range of elevation angle measurement | -90 °~+90 ° |
| Roll angle measurement range | -180 °~+180 ° |
| Requirements for effective combination navigation indicators of satellites | |
| Satellite integrated navigation heading angle measurement accuracy (sufficient maneuverability) | ≤0.3 ° (1 σ) |
| Elevation angle measurement accuracy of satellite integrated navigation (fully maneuverable): | ≤0.08 ° (1 σ) |
| Measurement accuracy of roll angle for satellite integrated navigation (fully maneuverable) | ≤0.08 ° (1 σ); |
| Horizontal positioning accuracy of satellite integrated navigation (satellite single point positioning, open environment) | ≤1.5 meters (1 σ) |
| 5 Satellite integrated navigation elevation positioning accuracy (satellite single point positioning, open environment) | ≤2.0 meters (1 σ) |
| Support receiving RTCM3. X data to enable the satellite to operate in RTK state. | |
| Optional products that support dual antenna orientation. | |
| Environmental adaptability | |
| Working temperature adaptability | -40 ℃~+60 ℃ |
| Storage temperature adaptability | -40 ℃~+60 ℃ |
Production process
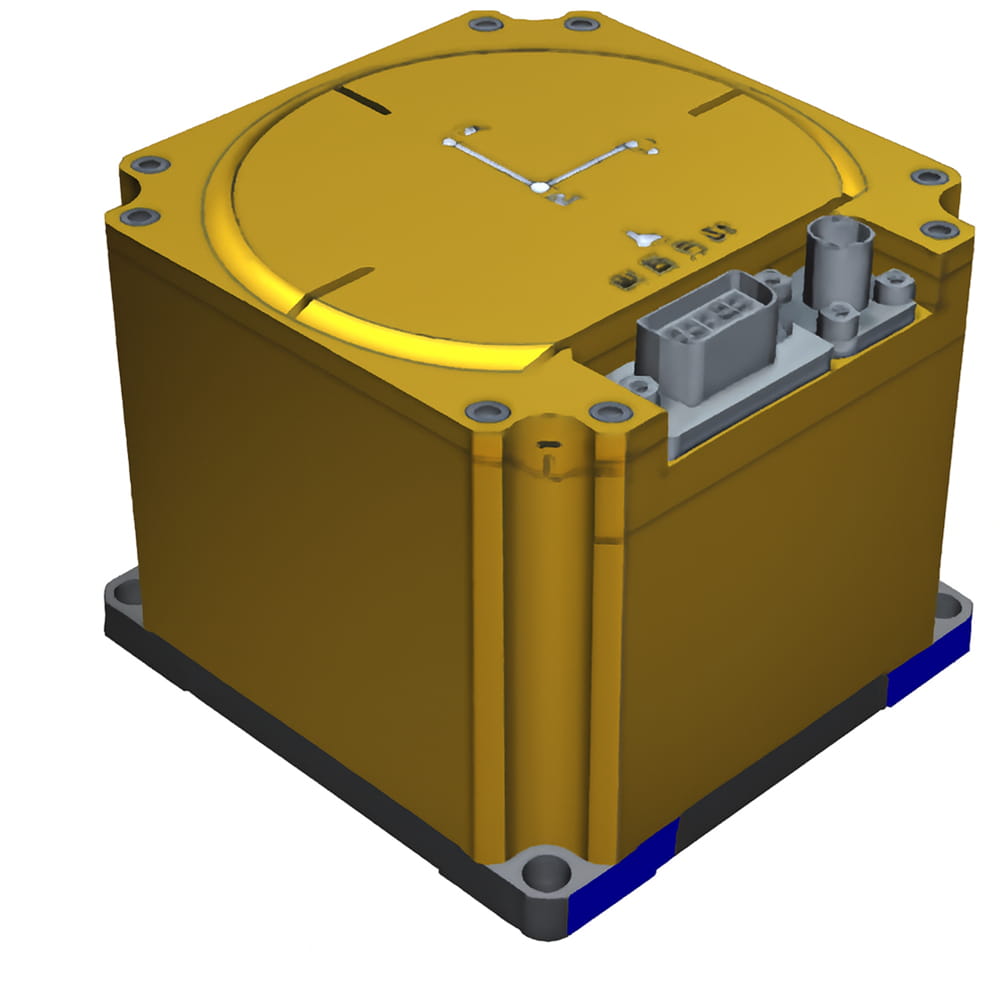
Product dimension

Application Scenarios



FAQ











Xml Privacy Policy Blog Sitemap
copyright @ Micro-Magic Inc All Rights Reserved.
 Network Supported
Network Supported



 English
English