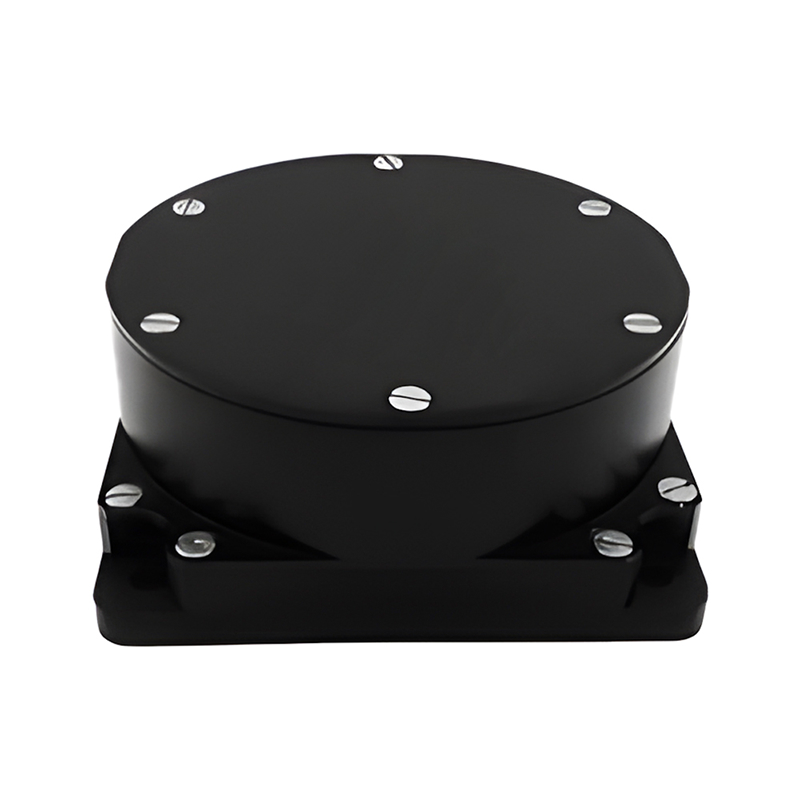
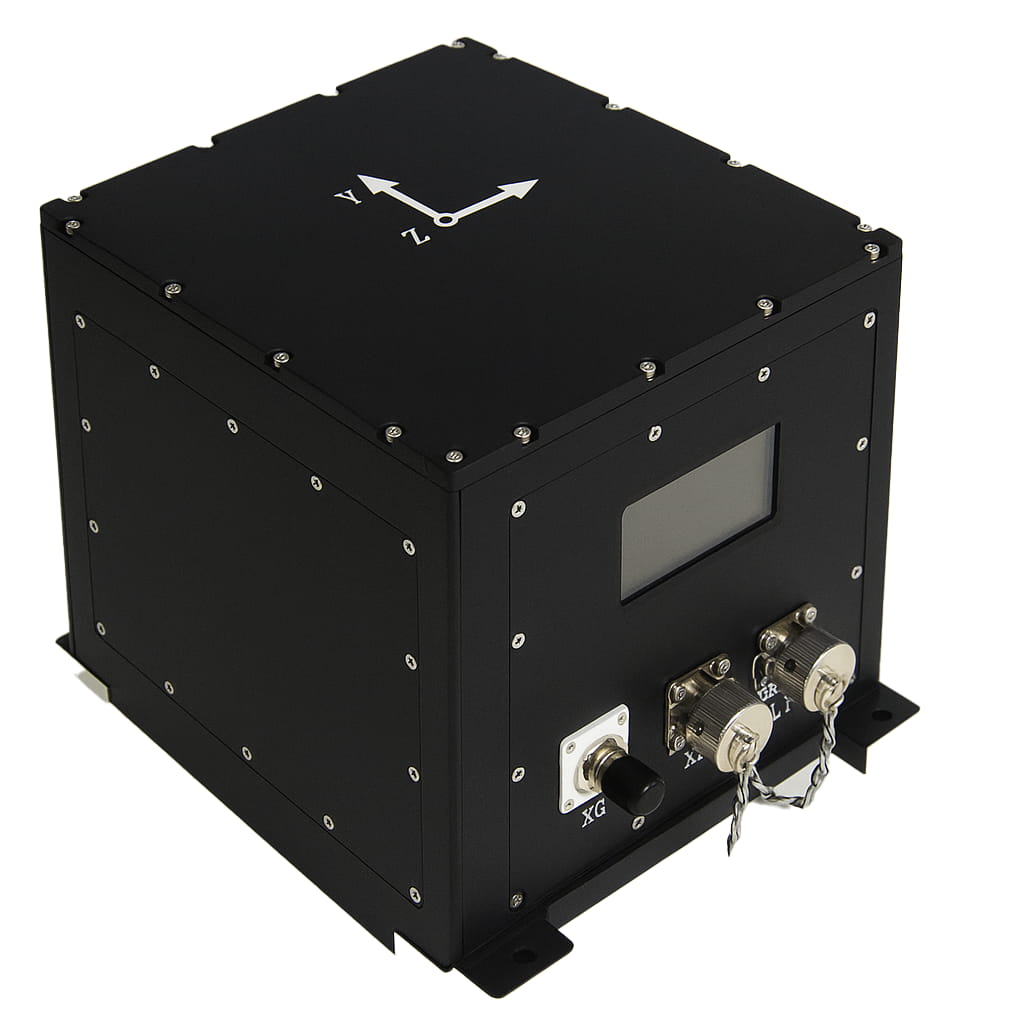
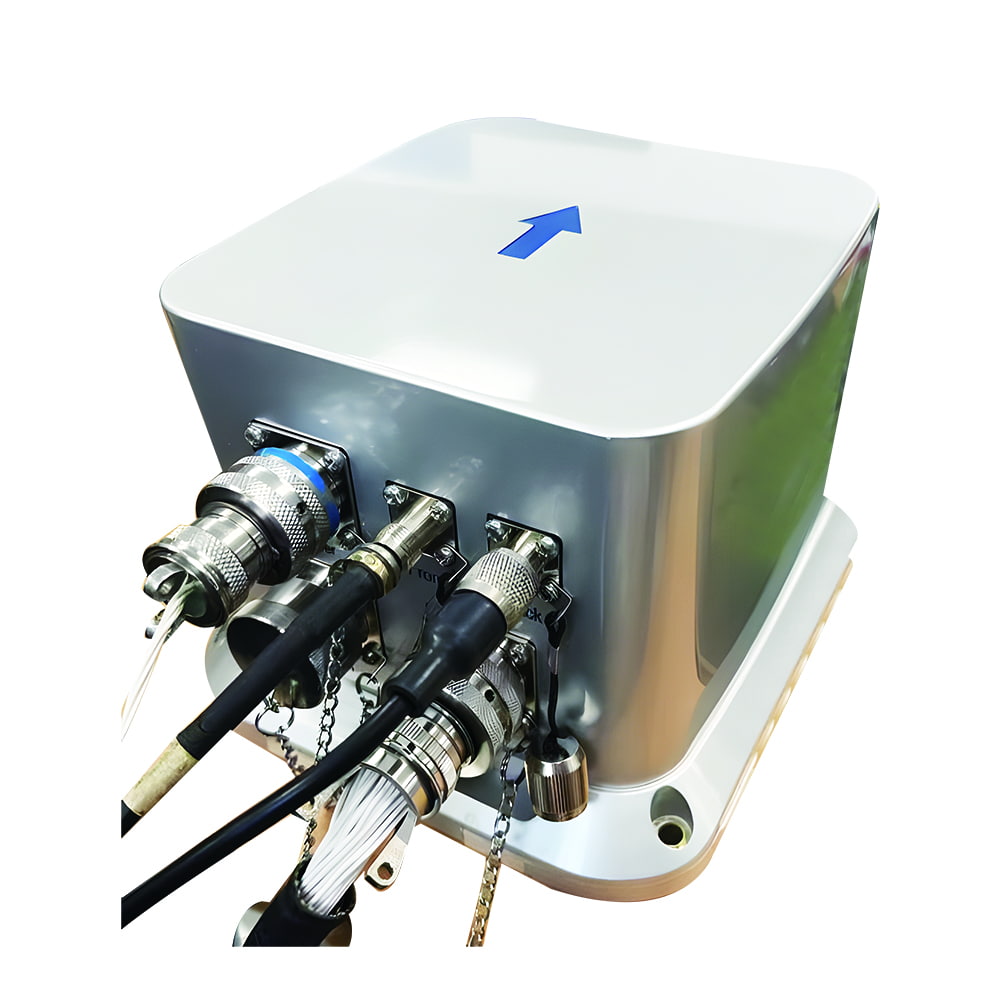
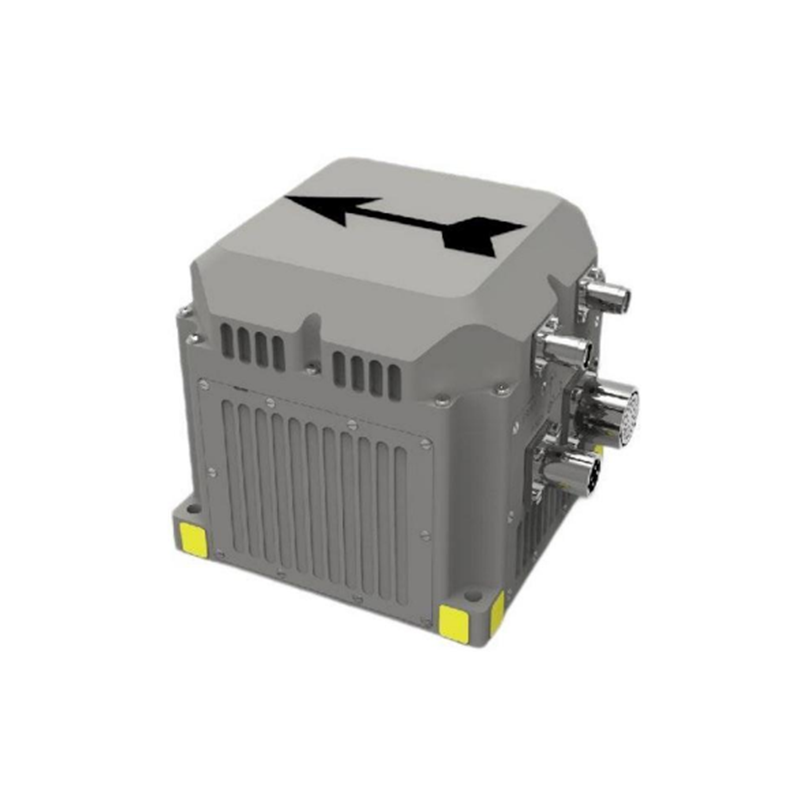
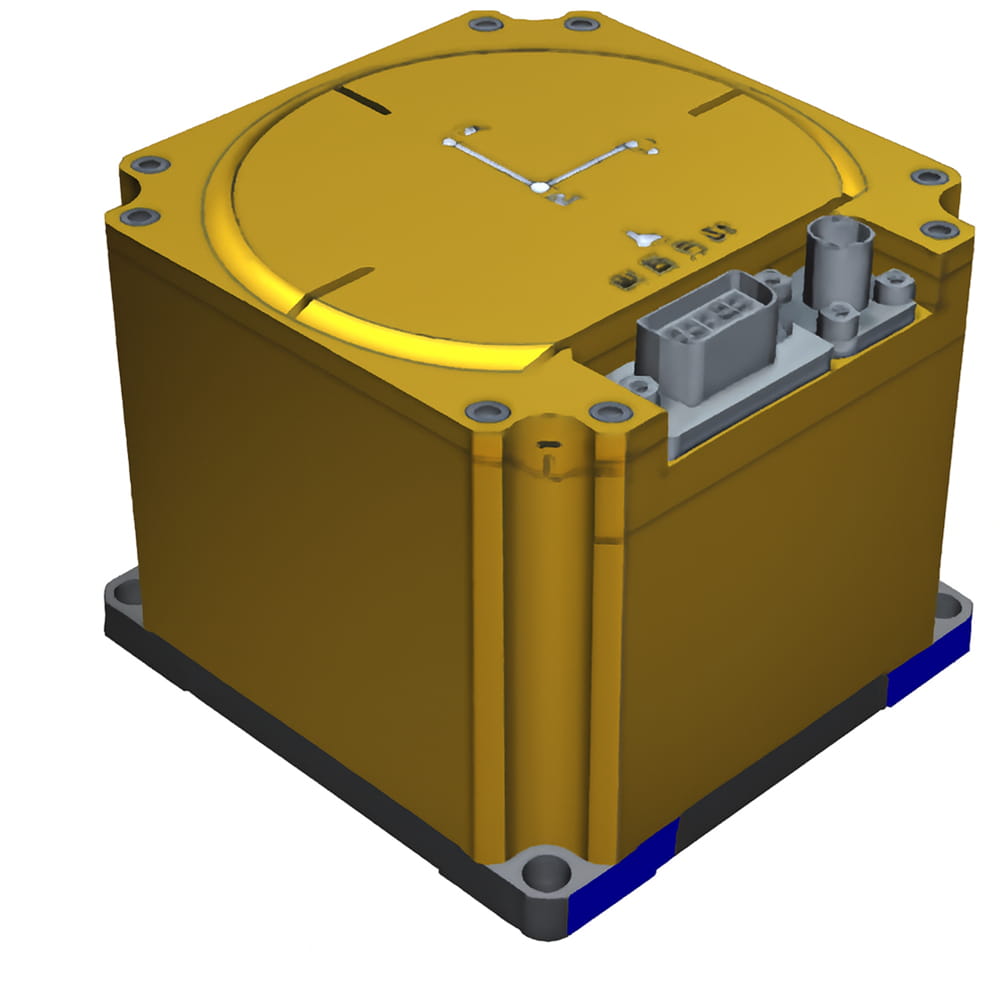
The IF4030S fiber optic inertial navigation system primarily consists of a miniaturized fiber optic gyroscope, quartz flexible accelerometer, power supply module, acquisition and computation module, and satellite navigation module. It is characterized by its compact size, lightweight, and high precision, making it suitable for various applications such as small and medium-sized drones, electro-optical pods, and underwater robots. The main features are as follows:
→ It has three accuracy levels: low, medium, and high, with self-north-finding accuracies of 0.5°, 0.25°, and 0.15°, respectively
→ It features multiple working modes, including pure inertial, inertial/satellite combination, inertial/DVL combination, inertial/odometer combination, inertial/vision combination, and marine compass
→ It possesses functions such as self-north-finding, transfer alignment, satellite-assisted moving-base alignment, high-precision post-processing, and heave measurement
→ Built-in multiple communication protocols, with configurable serial port baud rate and output protocol
→ Operating temperature: -45℃~+70℃
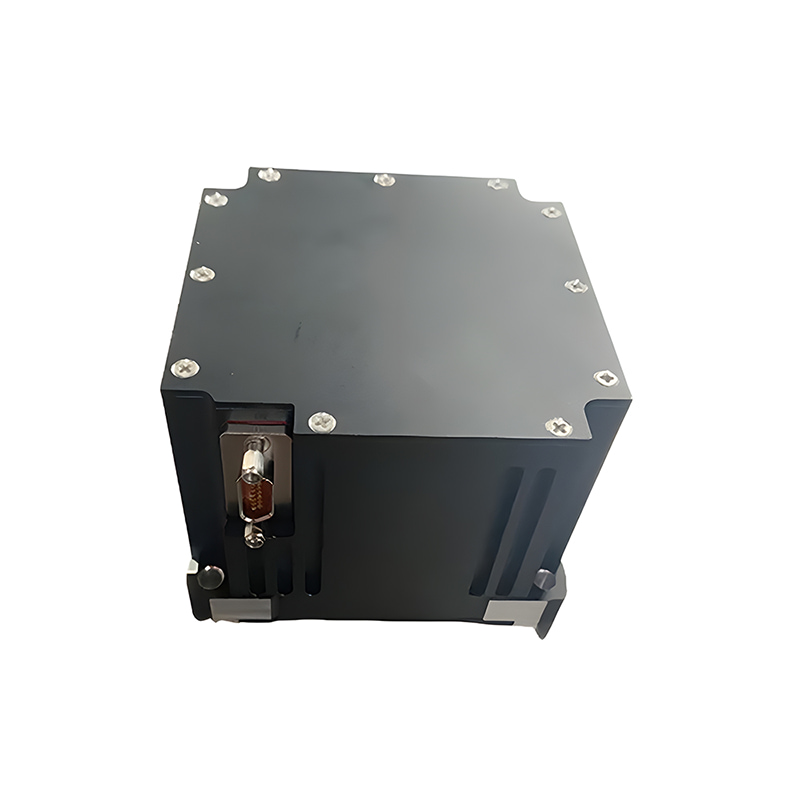
→ It features multiple interfaces such as RS422, RS232, Ethernet, and PPS input/output
→ Power supply: 12V~36V, power consumption <12W
→ Weight: 0.9kg
→ Size: 110mm×80mm×55mm
Part No, :
IF4030SOrder(MOQ) :
1Product Series and Parameters
| IF4030S-A | IF4030S-B | IF4030S-C | |||
| Heading alignment accuracy (1σ) | 0.05° (after maneuvering of the static dual-antenna (2m baseline) or single-antenna carrier) | ||||
|
|
|
|||
| Attitude alignment accuracy | 0.01° (1σ, Self North-seeking)), 0.008° (1σ, moving base) | ||||
| Heading holding accuracy | 0.2°/h (pure inertia) 0.08°/h (combined) |
0.15°/h (pure inertia) 0.05°/h (combined) |
0.1°/h (pure inertia) 0.03°/h (combined) |
||
| Pose holding accuracy (RMS) | 0.03° (pure inertia) 0.008° (satellite combination) |
0.02° (pure inertia) 0.008° (satellite combination) |
0.02° (pure inertia) 0.008° (satellite combination) |
||
| Speed accuracy (RMS) | 0.02m/s (RMS, integrated navigation, carrier velocity less than 500m/s) | ||||
| 4m/s (pure inertia) | 3m/s (pure inertia) | 2m/s (pure inertia) | |||
| Position accuracy (CEP) | Horizontal <1.5m, elevation <3m (RMS, integrated navigation, satellite single-point positioning, signal good) Horizontal <1cm+1ppm, vertical <2cm+1ppm (RMS, with good satellite carrier phase differential link) |
||||
| 6nmile/h (pure inertia) | 4nmile/h (pure inertia) | 2.5nmile/h (pure inertia) | |||
| Alignment time | 4.5 minutes (self-north finding), 1 minute (dual-antenna assisted orientation), 15 minutes (moving base) | ||||
| Gyroscope performance |
Range | 500°/s | |||
| Zero-bias stability | 0.2°/h (10s, smooth) | 0.1°/h (10s, smooth) | 0.06°/h (10s, smooth) | ||
| resolution | 0.01°/h | ||||
| bandwidth | 400Hz | ||||
| Accelerometer | Range | 30g | |||
| performance | Zero-bias stability | 50ug | |||
| Operating Temperature | -45℃~70℃ | ||||
| Electromagnetic Compatibility | Meet the relevant requirements of GJB151B for air force aircraft | ||||
| Interface | The power supply and communication socket model is J30J-25ZK, featuring interfaces such as RS422, RS232, Ethernet, and PPS input/output, with the option to customize a CAN interface The antenna socket is SMA×2 |
||||
| Data update rate | Navigation data: up to 200Hz, IMU data: up to 1kHz | ||||
| Power supply | Rated 28V DC, adaptable to 12V~36V | ||||
| Power consumption | <12W | ||||
| Overall dimensions | 110mm×80mm×55mm (excluding socket and backrest) | ||||
| Weight | 0.9kg | ||||
Production process
Product dimension

Application Scenarios



FAQ










Xml Privacy Policy Blog Sitemap
copyright @ Micro-Magic Inc All Rights Reserved.
 Network Supported
Network Supported



 English
English