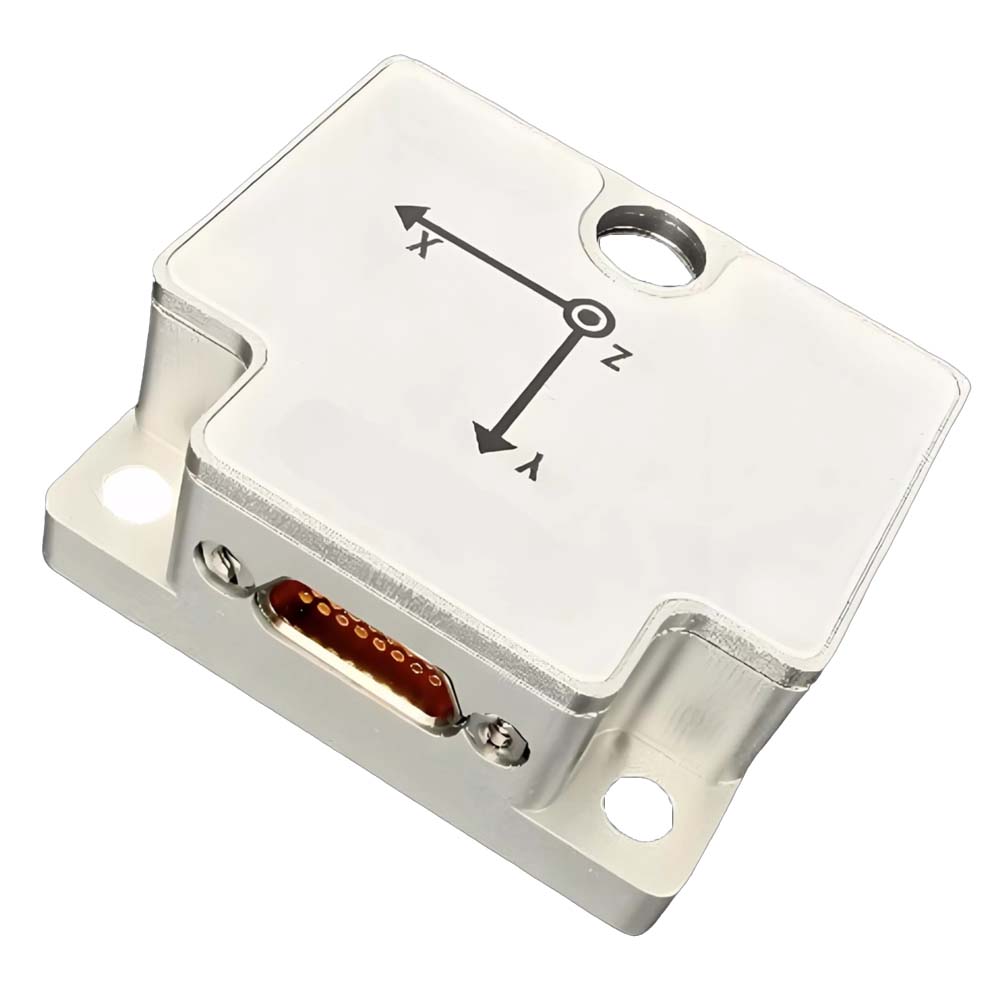
The U3600 series products are IMU/VRU/AHRS sensors composed of array MEMS-IMU, magnetometer, and barometer, and are equipped with self-developed adaptive extended Kalman filtering, IMU noise dynamic analysis algorithm, and carrier motion state analysis algorithm, which can meet the accuracy of attitude angle under high dynamic conditions and reduce heading angle drift.
Every sensor undergoes fine compensation including temperature, zero bias, scaling factor, and cross axis before leaving the factory. The U3600 series sensors transmit data through a USB interface and have rich user configurations. A multifunctional upper computer (GUI) can help quickly evaluate products, including but not limited to module configuration, data display, firmware upgrade, data recording, etc.
Part No, :
U3600Order(MOQ) :
1Product Series and Parameters
| Attitude Precision | U3600-A | U3600-B | U3600-C | U3600-D | U3600-E | Unit |
| Pitch (±90°) /Roll (±180°) (static) | 0.15(nom), 0.2(max) | ° | ||||
| Pitch (±90°) /Roll (±180°) (dynamic) | 0.15(nom), 0.2(max) | ° | ||||
| Yaw (±180°) static drift 2hrs (6DOF) ① | 0.15(nom), 0.2(max) | ° | ||||
| Yaw (±180°) dynamic drift (6DOF) ② | 9 | 5 | ° | |||
| Magnetic assist (AHRS)③ | / | / | 2(nom) 3(max) |
/ | 2(nom) 3(max) |
° |
| Yaw rotation error (6DOF) (rotation under 100°/s)④ | <0.8(nom) 3(max) | <0.8(nom) 1.5(max) | ° | |||
| Resolution | 0.01 | ° | ||||
| Notes: ①: The module was kept stationary for 2 hours ②: The measurement was taken after the module had been moving on an indoor cleaning robot for 1 hour. 1σ ③: After geomagnetic calibration, the measurement was taken in the absence of surrounding magnetic field interference, and the product needed to be configured in AHRS mode. ④: The turntable was rotated continuously for 10 revolutions, resulting in cumulative error in the heading angle |
||||||
| Gyroscope | U3600-A | U3600-B | U3600-C | U3600-D | U3600-E | Unit |
| Measurement range | ±2000 | ±2000~±4000 | °/s | |||
| Resolution | 16 | 20 | bit | |||
| Scale factor(100°/s)① | <500(nom) 600(max) |
<200(nom) 350(max) |
<100(nom) 200(max) |
ppm | ||
| Nonlinearity② | ±0.05 | %Fs | ||||
| Noise density (Bandwidth 80Hz) ③ | 0.015 | 0.008 | 0.025 | °/s√Hz | ||
| 3dB Bandwidth | 80(nom), 200(max) | Hz | ||||
| Zero speed output④ | ±0.1 | °/s | ||||
| Sampling rate | 1000 | Hz | ||||
| Zero bias instability (Allan) | 3 | 1.6 | 1.7 | °/h, 1σ | ||
| Zero bias stability (10s) | 10 | 5 | 4 | °/h, 1σ | ||
| Zero bias repeatability | 15 | 12 | 3.7 | °/h, 1σ | ||
| Angle random walk (Allan) | 0.42 | 0.25 | 0.1 | °/s√Hz, 1σ | ||
| Full temperature zero bias-40-85℃⑤ | Z: 0.015(nom), 0.03(max) Y: 0.05(nom), 0.18(max) X: 0.03(nom), 0.08(max) |
0.07(nom), 0.2(max) | °/s, 1σ | |||
| Accelerometer sensitivity (All three axis) | 0.1 | 0.05 | °/s/g | |||
| Notes: ①: Rotate the turntable 10 times in both directions and take the average measurement. ②: Maximum deviation from the best-fit straight line within the specified range. ③: Mean value of test samples. ④: After the initial zero bias calibration, the zero bias can be estimated in real-time in the algorithm engine. ⑤: Measured in the ultra-core laboratory incubator turntable, with a temperature rise slope less than 3°C/min. |
||||||
| Accelerometer | U3600-A | U3600-B | U3600-C | U3600-D | U3600-E | Unit |
| Measurement range | ±12 | ±8 ~±32 | g | |||
| Resolution | 16 | 20 | bit | |||
| Initial bias drift | 3(max) | 2(nom), 3(max) | mg | |||
| Nonlinearity | 0.5 | 0.01 | %Fs | |||
| Noise density (Bandwidth 90Hz) | 0.175 | 0.09 | 0.5(nom), 0.7(max) | mg/√Hz | ||
| 3dB Bandwidth | 145 | 90(nom), 200(max) | Hz | |||
| Sampling Rate | 1600 | 1000 | Hz | |||
| Zero bias instability (Allan) | 0.03 | 0.018 | 0.012 | mg, 1σ | ||
| Zero bias stability (10s) | 0.07 | 0.035 | 0.015 | mg, 1σ | ||
| Zero bias repeatability | 0.34 | 0.15 | 0.11 | mg, 1σ | ||
| Angle random walk (Allan) | 0.08 | 0.04 | 0.018 | m/s2/√h, 1σ | ||
| Full temperature zero bias-40-85℃ | 2(nom), 5(max) | mg, 1σ | ||||
| Magnetometer | U3600-A | U3600-B | U3600-C | U3600-D | U3600-E | Unit |
| Range | / | / | ±20 | / | ±20 | Gauss |
| Noise | / | / | 450 | / | 450 | nT |
| Linearity | / | / | 20 | / | 20 | uT |
| Temperature sensor | U3600-A | U3600-B | U3600-C | U3600-D | U3600-E | Unit |
| Range | -40 – 85 | ℃ | ||||
| Offset error | ±1 | K | ||||
| Barometer | U3600-A | U3600-B | U3600-C | U3600-D | U3600-E | Unit |
| Range | / | / | 300 ~ 1200 | / | 300 ~1200 | hPa |
| Resolution | / | / | 0.006 | / | 0.006 | hPa |
| Accuracy | / | / | ±0.06 | / | ±0.06 | hPa |
| Mechanical/Environment | U3600-A | U3600-B | U3600-C | U3600-D | U3600-E | Unit |
| Power supply | 5- 5.5 | V | ||||
| Power consumption | 215(max) | 310(max) | mW | |||
| Working temperature | -40 - 85 | ℃ | ||||
| Gyroscope range | ±125(min) – ±2000(nom/max) | ±4000 | °/s | |||
| Accelerometer range | ±3(min) –±12(nom –±24(max) | ±32 | g | |||
| Starting time① | 2 | s | ||||
| Size | 25.7*24*12 | mm | ||||
| Weight | <11 | g | ||||
| Shell material and process | Aluminum alloy CNC | |||||
| Assembling screws | M2.5 | |||||
| Connector model | Type C | |||||
| Anti-Vibration | 1.0mm(10Hz-58Hz) &≤20g(58Hz-600Hz) | |||||
| Shock (duration <1ms) | 2000 | g | ||||
| Environment protection | RoHS Directive 2011/65/EU | |||||
| EMC | LVD Directive 2014/35/EU | |||||
| Drop test | Free fall 3 times on a 75cm high experimental platform | |||||
| Temperature shock | Raise the temperature from -40 to 85 ℃ within 1h, 5 times | |||||
| Interface | Condition | Min | Normal | Max | Unit | |
| USB | Baud-rate① | 9600 | 115200 | 921600 | bps | |
| Starting position | 0 | 1 | bit | |||
| Data length | 0 | 8 | bits | |||
| Stop bit | 1 | bit | ||||
| Checksum | None | bit | ||||
| Output frame rate② | 0 | 100 | 1000 | Hz | ||
| Notes:①: The USB interface uses a USB-to-serial port, with the chip model being CP2102N, and users can download the driver by themselves. | ||||||
Production process
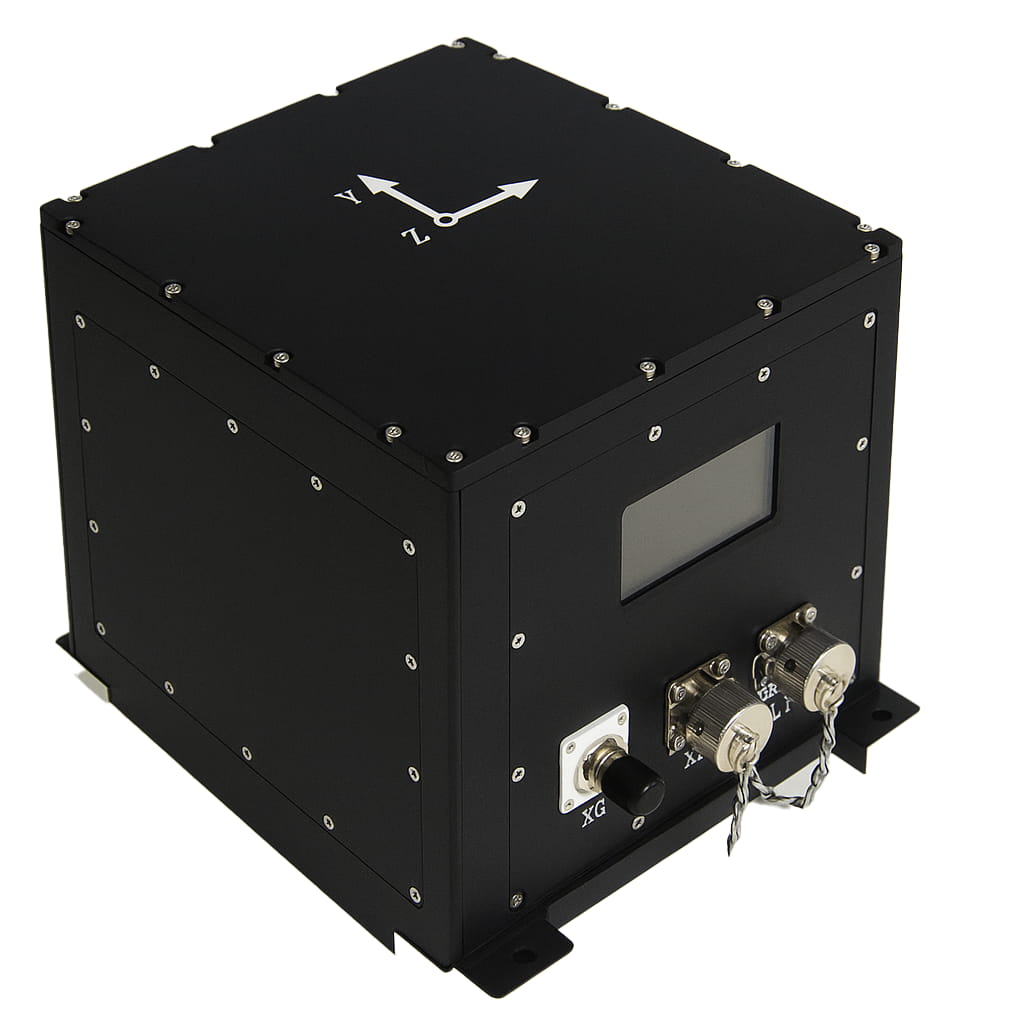
More similar products
Product dimension

Application Scenarios



FAQ














Xml Privacy Policy Blog Sitemap
copyright @ Micro-Magic Inc All Rights Reserved.
 Network Supported
Network Supported



 English
English